MUR Blog - Electric Drivetrain… A New Beginning
In a new exciting era of electric cars, we face the age-old problem of transferring power from a motor to the ground in a new light. Electric motors vary in many ways to their combustion counterpart. And while this presents some new challenges, it also provides some exciting opportunities to develop new drivetrain systems.
This year MUR has the opportunity to design and manufacture an entirely new electric FSA-E car. Building on the fantastic work from both the 2017 combustion and electric MUR teams this task has been made much more achievable. For all those who are unaware last year, MUR invested in two EMRAX 208 motors which are widely used across the world in FSAE competitions for their reliability and high-power density. To put this in perspective one EMRAX, 208 can produce a peak torque of 150 Nm corresponding to hooking up 4 of our current KTM-525 combustion engines to the wheels. However, maintaining this torque over the duration of a 30-minute race means these motors need considerable energy.
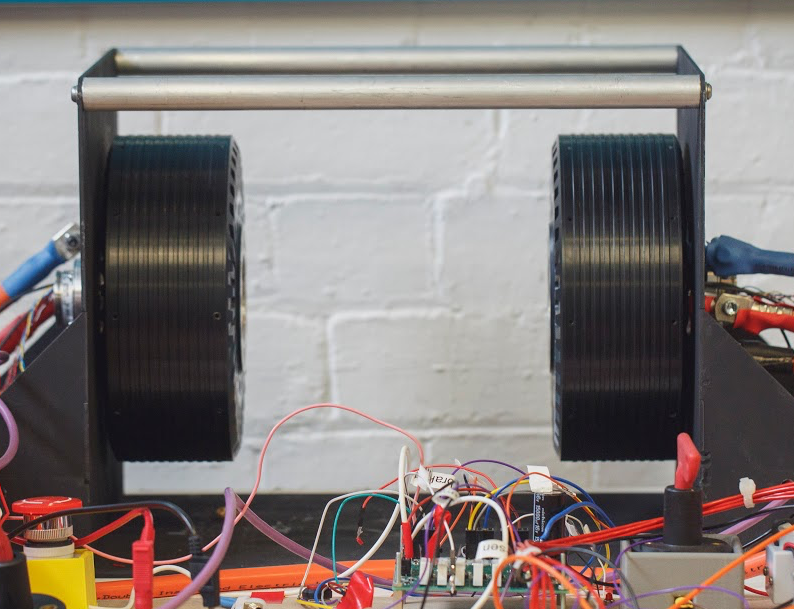
Figure 1: EMRAX 208 Motor
The EMRAX motor has no internal gearbox, most if not all motorbike engines use internal gearboxes to increase their torque to a usable level which is further increased through a chain drive to the rear wheels. One EMRAX 208 does not produce enough torque to be competitive in the FSAE competition utilising a chain drive alone. Given the financial investment MUR has already made we are re-using our two EMRAX 208 motors to ensure a competitive car. Though, this adds complexity the benefits far outweigh the costs. The fact we had already purchased two motors also made the decision more attractive.
MUR’s 2018 electric car design has been predominantly finalised, thus the electric drivetrain design will be briefly addressed. The design aims to maximise reliability and provide efficient transmission of power from the motors to the wheels. MUR’s experience with chain drives meant we could utilise a dual chain drive system to step up the motor torque and facilitate power transferral to the rear wheels. The design is shown below.
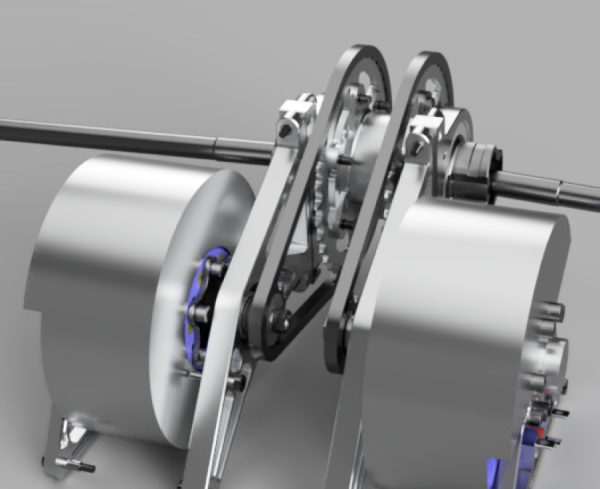
Figure 2: Powertrain assembly
One note of interest is the star-shaped central hub that connects both sprockets. No, it isn’t a spool, and nor a simplified differential. Instead the system uses a central shaft hub that allows both wheels to rotate entirely independent of each other. Mechanically, this stiffens the rear assembly as the large deflections that occur there requiring bracing. Furthermore, it helps to take some of the bending moment caused by the chains force away from the CV joint flanges that connects the half shafts to the wheels that are already experiencing high torsional stresses. A cross-section of the assembly is shown below so you can see how it works.
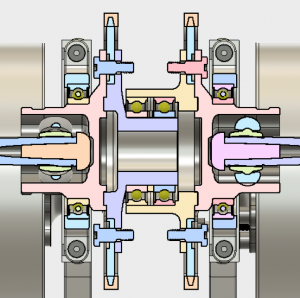
Figure 3: Outboard Assembly
Now the big question which we are asking is how will this car drive? Before beginning, reading former lead Brakes and Drivetrain Engineer Brendan Giang explanation of differentials is highly recommended. Mechanically, the hub mimics an open differential allowing both wheels to spin independently, however, each wheel is connected directly to a motor that can provide full torque to that wheel irrespective of the other wheels slip or non-slip state. Unaltered it is predicted to generate quite a lot of understeer due to the motors driving the wheels to rotate at the same speed. But the big difference is that we can electrically control how these motors behave in different grip conditions and by running them independently we open up the possibilities of torque vectoring.
Torque vectoring is the technology by which a car’s onboard ECU distributes torque to the wheels in proportion to the amount of traction they have alongside other variables. This is a particularly important function when the car traverses a corner given the speed differential between the outside and inside wheels. If done well, torque vectoring utilises the maximum amount of grip available from each tyre at every time instant in both acceleration and deceleration. By decelerating the inner wheels and accelerating the outer wheels while cornering a yaw moment is generated about the car’s centre of gravity effectively rotating the car around the corner. Rimac, a Croatian electric hyper-car company produced a video that explains the possibilities of torque vectoring in a racing context:
https://www.youtube.com/watch?v=bD2Do1gAuog
The primary reason for our setup above is because it lays the foundations for MUR to start researching and testing this new technology in the future. We are well aware that most high performing international FSAE teams employ four in-wheel hub motors that allow control of all wheels independently. This is a massive advantage over teams that underuse their tyres and one that MUR endeavours to master in the future. However, even if MUR can’t fully utilise torque vectoring this year, the chosen dual drive assembly will still enable the car to be much more robust on the race track. But we’ll have to wait and see if these predictions come to fruition.
About the Author:

Vincent Marciano
Brakes & Drivetrain Engineer, 2018